变换(Transformation)
想象一块画布,我们可以在画布上绘制一个图案。通常我们会对图像进行位移、旋转、放大缩小的操作,这些操作称为2D变换(2D Transformations)。
同样的,在空间中,我们对一个物体也可以进行位移(Translation)、旋转(Rotation)、缩放(Scale),称这些操作为3D变换(3D Transformations)。
那么我们进一步思考,相机拍摄出的照片是2D的,但是对象却是3D的。没错,实现三维空间到二维空间的变换,就可以把物体渲染成图片了。
缩放(Scale)
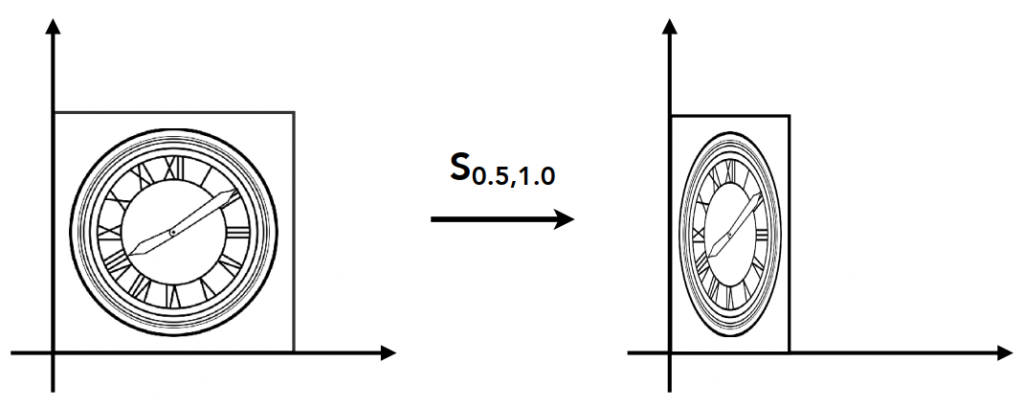
如图,将左图水平缩小到原来的0.5倍,垂直方向不变。
坐标变换:\(x’=s_{x} x \\ y’=s_{y} y\)。
写成矩阵形式:\(\begin{pmatrix} x’ \\ y’ \end{pmatrix} =\begin{pmatrix} s_{x} & 0 \\ 0 & s_{y} \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix} \)
若变换矩阵形如 \(\begin{pmatrix} -1 & 0 \\ 0 & 1 \end{pmatrix}\)(Reflection Matrix),则可实现翻转变换,如下图。
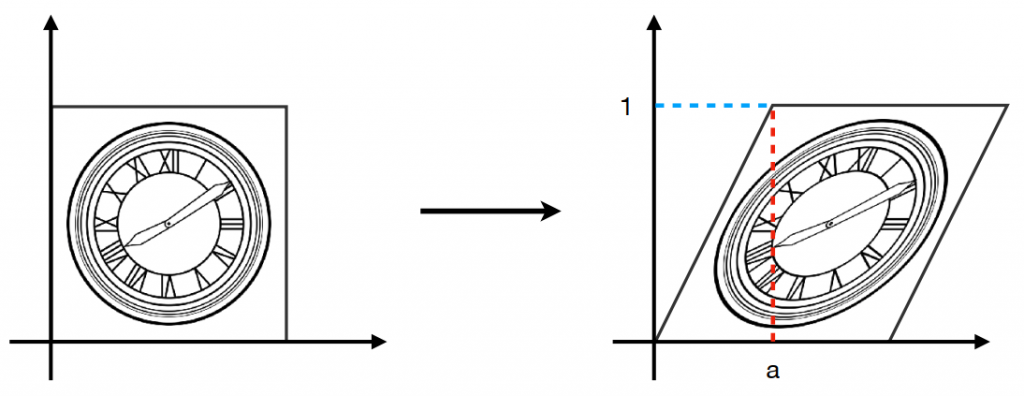
若变换矩阵形如 \(\begin{pmatrix} 1 & a \\ b & 1 \end{pmatrix}\)(Shear Matrix),则可实现错切变换,如下图。
当 \(a=1, b=0\) 时,为水平移位。当 \(a=0, b=1\) 时,为垂直移位。
旋转(Rotation)
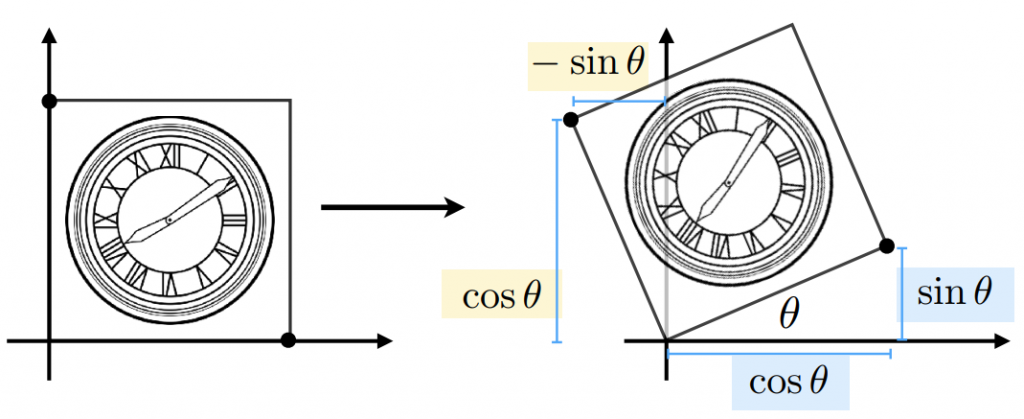
若将图像各个坐标绕原点逆时针旋转\(\theta\)度,有变换矩阵 \(R_{\theta}=\begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix}\)(Rotation Matrix)
位移(Translation)
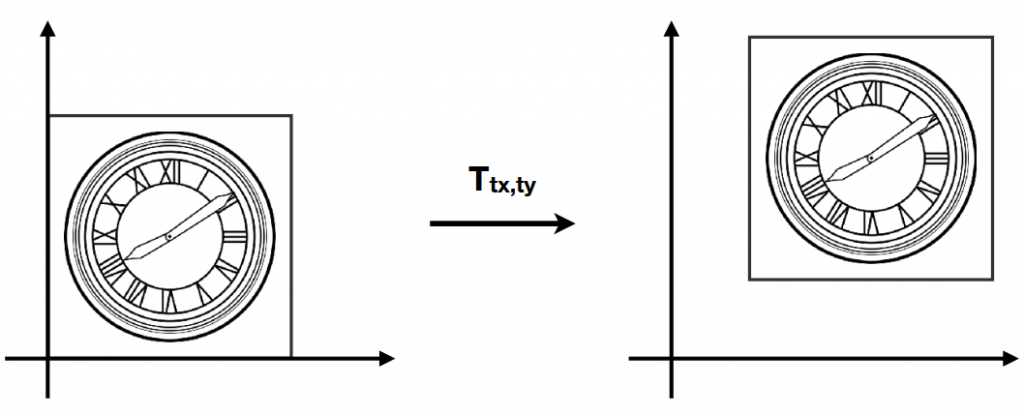
坐标变换:\(x’=x+t_{x} \\ y’=y+t_{y}\)。
矩阵形式:\(\begin{pmatrix} x’ \\ y’ \end{pmatrix} =\begin{pmatrix} a & b \\ c & d \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix} +\begin{pmatrix} t_{x} \\ t_{y} \end{pmatrix}, \begin{cases}a=d=1\\b=c=0\end{cases} \)
注意到,位移变换(仿射变换 Affine transformation)和缩放、旋转的矩阵形式不一样…那么,能不能把三者统一成一种形式,通过矩阵乘法将其进行组合呢?
齐次坐标(Homogenous Coordinates)
通过对一组坐标添加一个额外维度坐标w,对于点有w=1,向量有w=0。齐次坐标 \(\begin{pmatrix}x\\y\\w\end{pmatrix}\) 为点,满足 \(\begin{pmatrix}\frac{x}{w}\\\frac{y}{w}\\1\end{pmatrix}, w \ne 0\)
变换矩阵可以写成 \(\begin{pmatrix} x’ \\ y’ \\ 1 \end{pmatrix} =\begin{pmatrix} a & b & t_x \\ c & d & t_y \\ 0 & 0 & 1\end{pmatrix}\begin{pmatrix} x \\ y \\ 1 \end{pmatrix} = \begin{pmatrix}ax+by+t_x \\ cx+dy+t_y \\ 1 \end{pmatrix} \)
逆变换(Inverse Transform)
我们有变换 \(\begin{pmatrix} x’ \\ y’ \\ 1 \end{pmatrix} = A \begin{pmatrix}x \\ y \\ 1 \end{pmatrix} \)
则 \(\begin{pmatrix} x \\ y \\ 1 \end{pmatrix} = B\begin{pmatrix}x’ \\ y’ \\ 1 \end{pmatrix} \) 称 \(B\) 为 \(A\) 的逆变换,\(B=A^{-1}\)
组合变换(Composing Transforms)
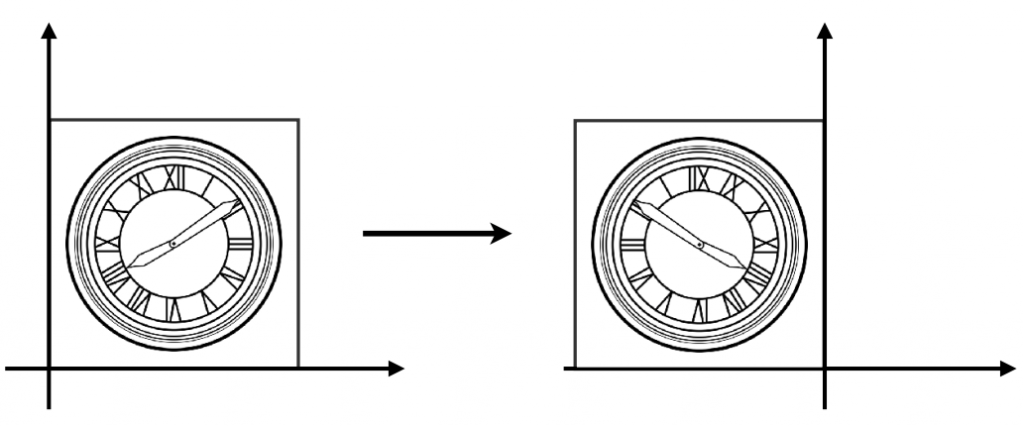
通过齐次坐标,统一了三种变换的矩阵形式。因此,我们可以通过矩阵的乘法(按顺序左乘,即从右边向左计算乘法)对变换进行组合。注意:矩阵乘法不满足交换律。
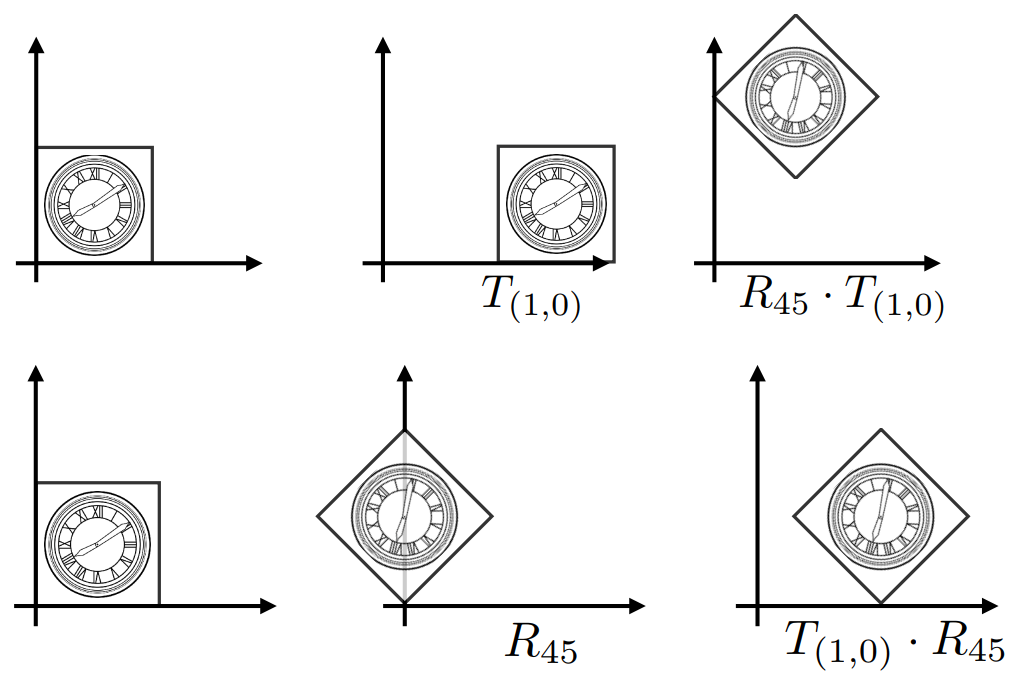
\(R_{45}T_{(1,0)} \ne T_{(1,0)}R_{45}\),上图以可视化的方式展示了变换的不可交换性。
先逆时针旋转45度,再位移(1,0)写为 \(T_{(1,0)}R_{45}\begin{pmatrix}x\\y\\1\end{pmatrix} = \begin{pmatrix}1 & 0 & 1\\0 & 1 & 0\\0 & 0 & 1\end{pmatrix}\begin{pmatrix}\cos45^\circ & -\sin45^\circ & 0\\\sin45^\circ & \cos45^\circ & 0\\0 & 0 & 1\end{pmatrix}\begin{pmatrix}x\\y\\1\end{pmatrix}\)
三维变换(3D Transformations)
通过对一组坐标添加一个额外维度坐标w,对于点有w=1,向量有w=0,转换为齐次坐标。齐次坐标 \(\begin{pmatrix}x\\y\\z\\w\end{pmatrix}\) 为点,满足 \(\begin{pmatrix}\frac{x}{w}\\\frac{y}{w}\\\frac{z}{w}\\1\end{pmatrix}, w \ne 0\)
变换矩阵可以写成 \(\begin{pmatrix} x’ \\ y’ \\ z’ \\ 1 \end{pmatrix} =\begin{pmatrix} a & b & c & t_x \\ d & e & f & t_y \\ g & h & i & t_z\\ 0 & 0 & 0 & 1\end{pmatrix}\begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix} \)
3D – 缩放变换
\(S_{(s_x,s_y,s_z)} = \begin{pmatrix} s_x & 0 & 0 & 0 \\ 0 & s_y & 0 & 0 \\ 0 & 0 & s_z & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}\)3D – 位移变换
\(T_{(t_x,t_y,t_z)} = \begin{pmatrix} 1 & 0 & 0 & t_x \\ 0 & 1 & 0 & t_y \\ 0 & 0 & 1 & t_z \\ 0 & 0 & 0 & 1 \end{pmatrix}\)3D – 旋转变换
绕X轴旋转 \(R_x(\alpha) = \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos\alpha & -\sin\alpha & 0 \\ 0 & \sin\alpha & \cos\alpha & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}\)
绕Y轴旋转 \(R_y(\alpha) = \begin{pmatrix} \cos\alpha & 0 & \sin\alpha & 0 \\ 0 & 1 & 0 & 0 \\ -\sin\alpha & 0 & \cos\alpha & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}\)
绕Z轴旋转 \(R_z(\alpha) = \begin{pmatrix} \cos\alpha & -\sin\alpha & 0 & 0 \\ \sin\alpha & \cos\alpha & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}\)
在三维空间中,我们通常用一组欧拉角\((\alpha,\beta,\theta)\)表示物体绕xyz三个轴的旋转角。由于变换的不可交换性,每个轴旋转变换的应用顺序不同,最后的效果也不一样。\(R_{xyz}(\alpha,\beta,\theta) = R_x(\alpha)R_y(\beta)R_z(\theta)\)
小结
What’s the order?
Linear Transform first or Translation first?
关于上述的顺序问题,由于Rotation的操作表示绕原点进行旋转,应当先进行线性变换(Scale、Rotate)再进行Translation位移操作。
在Unity中,3D物体的欧拉角旋转变换的顺序为 \(R_{zxy}(\theta,\alpha,\beta) = R_z(\theta)R_x(\alpha)R_y(\beta)\)